STM32F030F4 - Bare Metal - Blink
Introduction
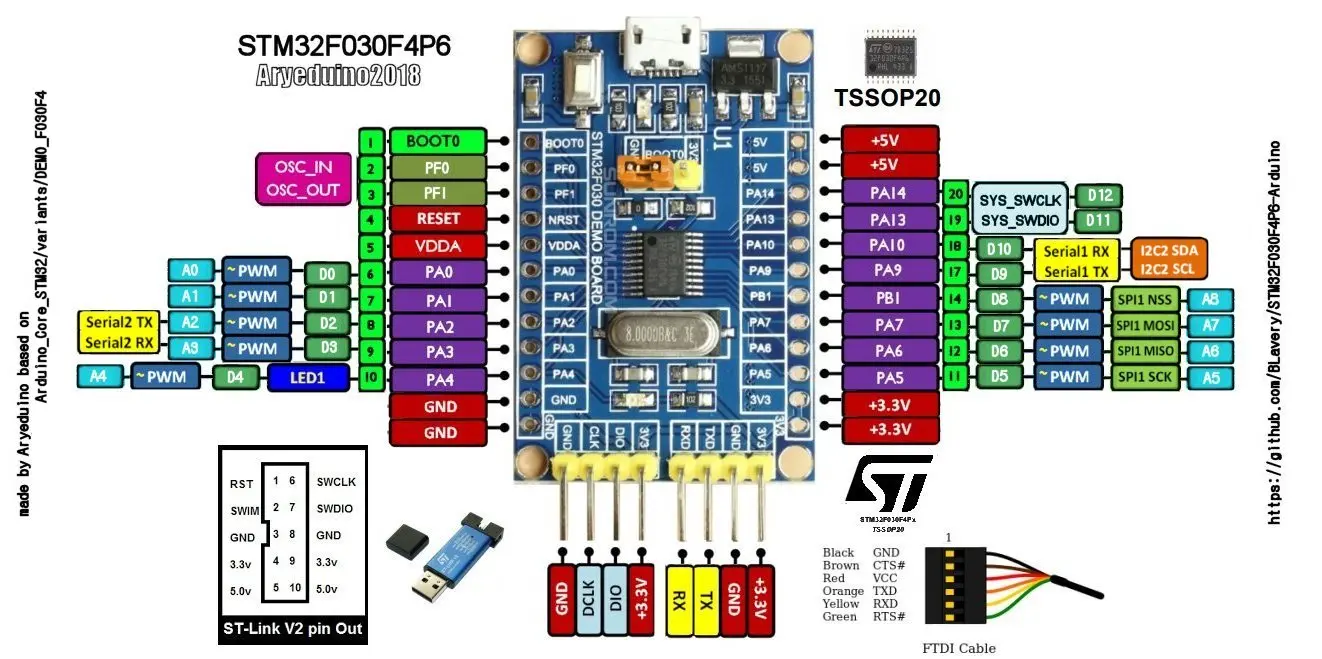
This post builds upon the code and techniques from “Bare Metal - Getting Started” to add a makefile and utilize C code. The goal is to toggle GPIO A4 which is connected to the onboard LED.
Linker Script
The linker script now contains definitions for SECTIONS which store specific parts of the application.
_estack = 0x20001000;
_Min_Leftover_RAM = 0x400;
MEMORY
{
FLASH ( rx ) : ORIGIN = 0x08000000, LENGTH = 16K
RAM ( rxw ) : ORIGIN = 0x20000000, LENGTH = 4K
}
SECTIONS
{
/* The vector table goes at the start of flash. */
.vector_table :
{
. = ALIGN(4);
KEEP (*(.vector_table))
. = ALIGN(4);
} >FLASH
/* The 'text' section contains the main program code. */
.text :
{
. = ALIGN(4);
*(.text)
*(.text*)
. = ALIGN(4);
} >FLASH
/* The 'rodata' section contains read-only data,
* constants, strings, information that won't change. */
.rodata :
{
. = ALIGN(4);
*(.rodata)
*(.rodata*)
. = ALIGN(4);
} >FLASH
/* The 'data' section is space set aside in RAM for
* things like variables, which can change. */
_sidata = .;
.data : AT(_sidata)
{
. = ALIGN(4);
/* Mark start/end locations for the 'data' section. */
_sdata = .;
*(.data)
*(.data*)
_edata = .;
. = ALIGN(4);
} >RAM
/* The 'bss' section is similar to the 'data' section,
* but its space is initialized to all 0s at the
* start of the program. */
.bss :
{
. = ALIGN(4);
/* Also mark the start/end of the BSS section. */
_sbss = .;
*(.bss)
*(.bss*)
*(COMMON)
. = ALIGN(4);
_ebss = .;
} >RAM
/* Space set aside for the application's heap/stack. */
.dynamic_allocations :
{
. = ALIGN(4);
_ssystem_ram = .;
. = . + _Min_Leftover_RAM;
. = ALIGN(4);
_esystem_ram = .;
} >RAM
}Vector Table
The vector table is copied from the STM32CubeF0 repository and can be found in the startup_stm32f030x6.s file. The startup code at the beginning has been moved into a seperate boot.s file leaving only the vector table and default interrupt handler.
.syntax unified
.cpu cortex-m0
.fpu softvfp
.thumb
.global vtable
/*
* The vector table.
*/
.type vtable, %object
.section .vector_table,"a",%progbits
vtable:
.word _estack
.word Reset_Handler
.word NMI_Handler
.word HardFault_Handler
.word 0
.word 0
.word 0
.word 0
.word 0
.word 0
.word 0
.word SVC_Handler
.word 0
.word 0
.word PendSV_Handler
.word SysTick_Handler
.word WWDG_IRQHandler /* Window WatchDog */
.word 0 /* Reserved */
.word RTC_IRQHandler /* RTC through the EXTI line */
.word FLASH_IRQHandler /* FLASH */
.word RCC_IRQHandler /* RCC */
.word EXTI0_1_IRQHandler /* EXTI Line 0 and 1 */
.word EXTI2_3_IRQHandler /* EXTI Line 2 and 3 */
.word EXTI4_15_IRQHandler /* EXTI Line 4 to 15 */
.word 0 /* Reserved */
.word DMA1_Channel1_IRQHandler /* DMA1 Channel 1 */
.word DMA1_Channel2_3_IRQHandler /* DMA1 Channel 2 and Channel 3 */
.word DMA1_Channel4_5_IRQHandler /* DMA1 Channel 4 and Channel 5 */
.word ADC1_IRQHandler /* ADC1 */
.word TIM1_BRK_UP_TRG_COM_IRQHandler /* TIM1 Break, Update, Trigger and Commutation */
.word TIM1_CC_IRQHandler /* TIM1 Capture Compare */
.word 0 /* Reserved */
.word TIM3_IRQHandler /* TIM3 */
.word 0 /* Reserved */
.word 0 /* Reserved */
.word TIM14_IRQHandler /* TIM14 */
.word 0 /* Reserved */
.word TIM16_IRQHandler /* TIM16 */
.word TIM17_IRQHandler /* TIM17 */
.word I2C1_IRQHandler /* I2C1 */
.word 0 /* Reserved */
.word SPI1_IRQHandler /* SPI1 */
.word 0 /* Reserved */
.word USART1_IRQHandler /* USART1 */
.word 0 /* Reserved */
.word 0 /* Reserved */
.word 0 /* Reserved */
.word 0 /* Reserved */
// 48
// (Location to boot from for RAM startup)
#define boot_ram_base 0xF108F85F
.word boot_ram_base
/*
* Setup weak aliases for each exception handler to the
* default one. These can be updated later, or just
* overridden since they're weak refs.
* The reset_handler is set up separately.
*/
.weak NMI_Handler
.thumb_set NMI_Handler,Default_Handler
.weak HardFault_Handler
.thumb_set HardFault_Handler,Default_Handler
.weak SVC_Handler
.thumb_set SVC_Handler,Default_Handler
.weak PendSV_Handler
.thumb_set PendSV_Handler,Default_Handler
.weak SysTick_Handler
.thumb_set SysTick_Handler,Default_Handler
.weak WWDG_IRQHandler
.thumb_set WWDG_IRQHandler,Default_Handler
.weak RTC_IRQHandler
.thumb_set RTC_IRQHandler,Default_Handler
.weak FLASH_IRQHandler
.thumb_set FLASH_IRQHandler,Default_Handler
.weak RCC_IRQHandler
.thumb_set RCC_IRQHandler,Default_Handler
.weak EXTI0_1_IRQHandler
.thumb_set EXTI0_1_IRQHandler,Default_Handler
.weak EXTI2_3_IRQHandler
.thumb_set EXTI2_3_IRQHandler,Default_Handler
.weak EXTI4_15_IRQHandler
.thumb_set EXTI4_15_IRQHandler,Default_Handler
.weak DMA1_Channel1_IRQHandler
.thumb_set DMA1_Channel1_IRQHandler,Default_Handler
.weak DMA1_Channel2_3_IRQHandler
.thumb_set DMA1_Channel2_3_IRQHandler,Default_Handler
.weak DMA1_Channel4_5_IRQHandler
.thumb_set DMA1_Channel4_5_IRQHandler,Default_Handler
.weak ADC1_IRQHandler
.thumb_set ADC1_IRQHandler,Default_Handler
.weak TIM1_BRK_UP_TRG_COM_IRQHandler
.thumb_set TIM1_BRK_UP_TRG_COM_IRQHandler,Default_Handler
.weak TIM1_CC_IRQHandler
.thumb_set TIM1_CC_IRQHandler,Default_Handler
.weak TIM3_IRQHandler
.thumb_set TIM3_IRQHandler,Default_Handler
.weak TIM14_IRQHandler
.thumb_set TIM14_IRQHandler,Default_Handler
.weak TIM16_IRQHandler
.thumb_set TIM16_IRQHandler,Default_Handler
.weak TIM17_IRQHandler
.thumb_set TIM17_IRQHandler,Default_Handler
.weak I2C1_IRQHandler
.thumb_set I2C1_IRQHandler,Default_Handler
.weak SPI1_IRQHandler
.thumb_set SPI1_IRQHandler,Default_Handler
.weak USART1_IRQHandler
.thumb_set USART1_IRQHandler,Default_Handler
.size vtable, .-vtable
/*
* A 'Default' interrupt handler. This is where interrupts
* which are not otherwise configured will go.
* Here it's just an infinite loop.
*/
.section .text.Default_Handler,"ax",%progbits
Default_Handler:
default_interrupt_loop:
B default_interrupt_loop
.size Default_Handler, .-Default_HandlerBoot
Following code will take care of copying initial data from flash to RAM, filling empty space with 0’s and finally branching to the main() method.
.syntax unified
.cpu cortex-m0
.fpu softvfp
.thumb
.global Reset_Handler
.type Reset_Handler, %function
Reset_Handler:
LDR r0, =_estack
MOV sp, r0 /* set stack pointer */
// Copy data from flash to RAM data init section
MOVS r0, #0
// Load the start/end addresses of the data section,
// and the start of the data init section.
LDR r1, =_sdata
LDR r2, =_edata
LDR r3, =_sidata
B copy_sidata_loop
copy_sidata:
// Offset the data init section by our copy progress.
LDR r4, [r3, r0]
// Copy the current word into data, and increment.
STR r4, [r1, r0]
ADDS r0, r0, #4
copy_sidata_loop:
// Unless we've copied the whole data section, copy the
// next word from sidata->data.
ADDS r4, r0, r1
CMP r4, r2
BCC copy_sidata
// Once we are done copying the data section into RAM,
// move on to filling the BSS section with 0s.
MOVS r0, #0
LDR r1, =_sbss
LDR r2, =_ebss
B reset_bss_loop
// Fill the BSS segment with '0's.
reset_bss:
// Store a 0 and increment by a word.
STR r0, [r1]
ADDS r1, r1, #4
reset_bss_loop:
// We'll use R1 to count progress here; if we aren't
// done, reset the next word and increment.
CMP r1, r2
BCC reset_bss
// Branch to the 'main' method.
B main
.size Reset_Handler, .-Reset_HandlerA little help
We’ll take a few files from the STM32CubeF0 repository to avoid having to look up peripheral register addresses and NVIC (vector table) configurations. Those files are:
STM32CubeF0/Drivers/CMSIS/Device/ST/STM32F0xx/Include/stm32f030x6.h
STM32CubeF0/Drivers/CMSIS/Include/core_cm0.h
STM32CubeF0/Drivers/CMSIS/Include/cmsis_version.h
STM32CubeF0/Drivers/CMSIS/Include/cmsis_gcc.h
STM32CubeF0/Drivers/CMSIS/Include/cmsis_compiler.h
STM32CubeF0/Drivers/CMSIS/Device/ST/STM32F0xx/Include/system_stm32f0xx.hLet’s copy them in a subdirectory in our project root resulting in the following structure:
📦bare-metal-blink
┣ 📂STM32CubeF0
┃ ┣ 📜cmsis_compiler.h
┃ ┣ 📜cmsis_gcc.h
┃ ┣ 📜cmsis_version.h
┃ ┣ 📜core_cm0.h
┃ ┣ 📜stm32f030x6.h
┃ ┗ 📜system_stm32f0xx.h
┣ 📜STM32F030F4.ld
┣ 📜boot.s
┗ 📜startup_stm32f030x6.sMain.c
It’s finally time for some C code. Following code toggles the onboard LED at GPIOA4 every second.
#include "STM32CubeF0/stm32f030x6.h"
#define LED_PIN 4
int SysTickMsCounter = 0;
void SysTick_Handler() {
SysTickMsCounter++;
}
void sleep(int ms) {
// enable SysTick timer
SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk;
// wait
SysTickMsCounter = 0;
while(SysTickMsCounter < ms);
// disable SysTick timer
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk;
}
int main(void)
{
// Default internal clock @ 8MHz
const int SystemClock = 8000000;
// Setup SysTick timer to generate an interrupt every millisecond
SysTick->LOAD = (uint32_t)((SystemClock / 1000) -1);
SysTick->VAL = 0;
SysTick->CTRL = (SysTick_CTRL_CLKSOURCE_Msk | SysTick_CTRL_TICKINT_Msk);
// Setup GPIO as push/pull low speed
RCC->AHBENR |= RCC_AHBENR_GPIOAEN;
GPIOA->MODER &= ~(0x3 << (LED_PIN*2));
GPIOA->MODER |= (0x1 << (LED_PIN*2));
GPIOA->OTYPER &= ~(1 << LED_PIN);
while (1)
{
// toggle gpio
GPIOA->ODR ^= (1 << LED_PIN);
sleep(1000);
}
return 0;
}Makefile
Now while we could compile it manually a makefile makes this a lot easier.
TARGET = main
# Define the linker script location and chip architecture.
LD_SCRIPT = STM32F030F4.ld
MCU_SPEC = cortex-m0
# Toolchain definitions (ARM bare metal defaults)
TOOLCHAIN = /usr
CC = $(TOOLCHAIN)/bin/arm-none-eabi-gcc
AS = $(TOOLCHAIN)/bin/arm-none-eabi-as
LD = $(TOOLCHAIN)/bin/arm-none-eabi-ld
OC = $(TOOLCHAIN)/bin/arm-none-eabi-objcopy
OD = $(TOOLCHAIN)/bin/arm-none-eabi-objdump
OS = $(TOOLCHAIN)/bin/arm-none-eabi-size
# Assembly directives.
ASFLAGS += -c
ASFLAGS += -O0
ASFLAGS += -mcpu=$(MCU_SPEC)
ASFLAGS += -mthumb
ASFLAGS += -Wall
# (Set error messages to appear on a single line.)
ASFLAGS += -fmessage-length=0
# C compilation directives
CFLAGS += -mcpu=$(MCU_SPEC)
CFLAGS += -mthumb
CFLAGS += -Wall
CFLAGS += -g
# (Set error messages to appear on a single line.)
CFLAGS += -fmessage-length=0
# (Set system to ignore semihosted junk)
CFLAGS += --specs=nosys.specs
# Linker directives.
LSCRIPT = ./$(LD_SCRIPT)
LFLAGS += -mcpu=$(MCU_SPEC)
LFLAGS += -mthumb
LFLAGS += -Wall
LFLAGS += -Wall
LFLAGS += --specs=nosys.specs
LFLAGS += -nostdlib
LFLAGS += -lgcc
LFLAGS += -T$(LSCRIPT)
STARTUP = ./startup_stm32f030x6.s
BOOT_S = ./boot.s
MAIN_C = ./main.c
OBJS = $(STARTUP:.s=.o)
OBJS += $(BOOT_S:.s=.o)
OBJS += $(MAIN_C:.c=.o)
.PHONY: all
all: $(TARGET).bin
%.o: %.s
mkdir build -p
$(CC) -x assembler-with-cpp $(ASFLAGS) $< -o build/$@
%.o: %.c
$(CC) -c $(CFLAGS) $(INCLUDE) $< -o build/$@
$(TARGET).elf: $(OBJS)
$(CC) $(addprefix build/, $^) $(LFLAGS) -o build/$@
$(TARGET).bin: $(TARGET).elf
$(OC) -S -O binary build/$< build/$@
$(OS) build/$<
.PHONY: clean
clean:
rm -vf build/*Build
Make sure you have all the files in place:
📦bare-metal-blink
┣ 📂STM32CubeF0
┃ ┣ 📜cmsis_compiler.h
┃ ┣ 📜cmsis_gcc.h
┃ ┣ 📜cmsis_version.h
┃ ┣ 📜core_cm0.h
┃ ┣ 📜stm32f030x6.h
┃ ┗ 📜system_stm32f0xx.h
┣ 📜Makefile
┣ 📜STM32F030F4.ld
┣ 📜boot.s
┣ 📜main.c
┗ 📜startup_stm32f030x6.sThen start the build
make allNow you should see a build/ directory with a few files. main.elf contains debugging symbols and should only be used with gdb. main.bin contains the application binary without debugging symbols.
Flash
To flash main.bin run:
st-flash write build/main.bin 0x08000000Checking GPIO A4 with a logic analyzer shows that the code is working as expected and toggling the pin every second. 